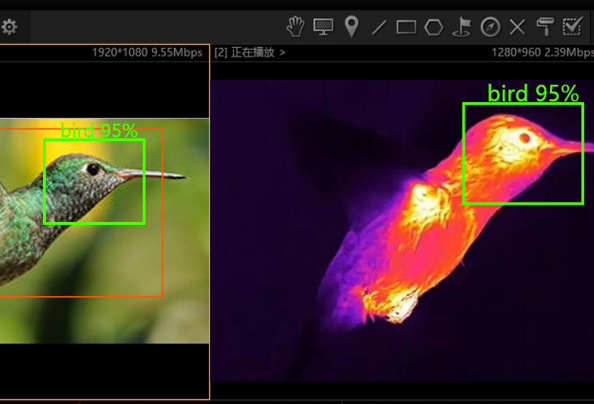

本系統是由一台可見光探測器加一台驅鳥激光器整合在同一雲台上,保持了驅鳥激光光斑一直處于可見光圖像中心位置,同時在前端灌入自主研發(fā)算法,以識别圖像中鳥類、人與車輛種(zhǒng)類。通過(guò)識别算法來旋轉雲台以保證被驅離鳥處于圖像中心以滿足驅鳥激光驅鳥需要,以及決定控制驅鳥激光器的開(kāi)啓與否,從而解決光伏存在的鳥害問題。

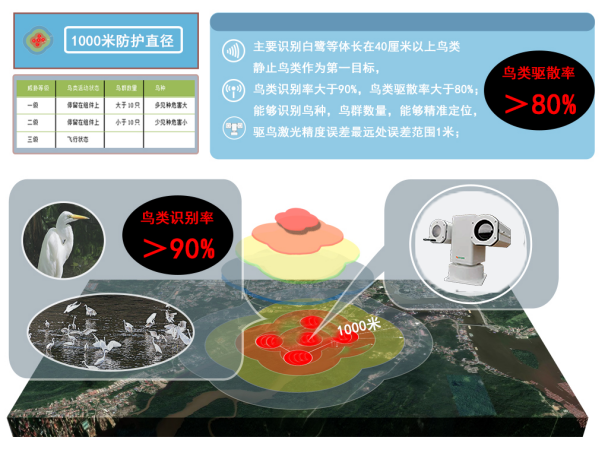
威脅等級 | 鳥類活動狀态 | 鳥群數量 | 鳥種(zhǒng) |
一級 | 停留在組件上 | 大于10隻 | 多見種(zhǒng)危害大 |
二級 | 停留在組件上 | 小于10隻 | 少見種(zhǒng)危害小 |
三級 | 飛行狀态 |
|
|